
4.E9 : Mouvement d'une locomotive
Dans le but de mettre en vente un nouveau modèle de locomotive pour train à grande vitesse, on fait subir à un prototype une série de tests.
Information : l’Union internationale des chemins de fer considère qu’un train roule à grande vitesse si sa vitesse dépasse \(\pu{200 km/h}\).
A - Démarrage de la locomotive
Dans un premier temps, on souhaite étudier le démarrage de la locomotive sur une portion de voie rectiligne horizontale.
Dans cette partie, on assimilera la locomotive à un point L et on travaillera dans un repère \((O, Ox)\).
Lors de ce test, on enregistre la vitesse du point \(L\) au cours du temps, ce qui permet d’obtenir le graphique ci-dessous. On admettra que l’abscisse \(v_x\) du vecteur vitesse est égale à la vitesse.
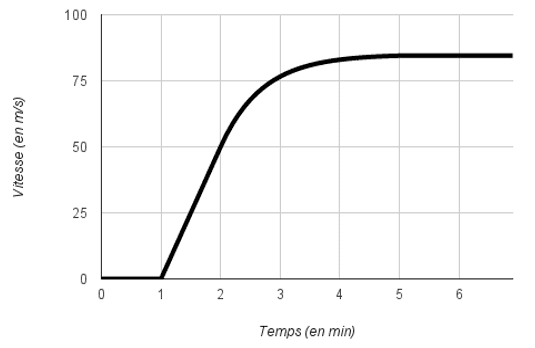
1 Quelle est la nature du mouvement de \(0\) à \(\pu{1 min}\) ?
2 On s’intéresse au mouvement de \(1\) à \(\pu{2 min}\).
2.a A partir du graphique, donner l’expression de la coordonnée \(v_x\) du vecteur vitesse du point L en fonction du temps.
2.b En déduire l’expression de la coordonnée \(a_x\) du vecteur accélération en précisant les unités.
2.c Quelle est la nature du mouvement de \(1\) min à \(\pu{2 min}\) ?
3 Quelle est la nature du mouvement de \(2\) min à \(\pu{5 min}\) ?
4 On s’intéresse au mouvement au-delà de \(\pu{5 min}\).
4.a Quelle est la nature du mouvement ?
4.b La locomotive roule-t-elle à grande vitesse ?
B - Test des freins de la locomotive
La locomotive se déplace sur une portion de voie ferrée rectiligne horizontale. On assimilera la locomotive à un point \(L\). Le conducteur commence à freiner à l’instant \(\pu{t = 0 s}\) en un point \(O\) pris comme origine du repère de travail, et ce jusqu’à ce que la locomotive soit arrêtée. L’équation horaire du point \(L\) est alors \(x(t) = -0,30·t^2 + 50·t\) où \(x\) est en \(\pu{m}\) et \(t\) en \(\pu{s}\).
1 Donner les unités des deux valeurs numériques de l’équation horaire du point \(L\).
2 Établir l’expression de la coordonnée de la vitesse puis l’expression de la coordonnée de l’accélération.
3 Justifier à partir des résultats de la question précédente que le mouvement est rectiligne uniformément ralenti.
4 Quelle est la valeur de la vitesse de la locomotive à l’instant où le conducteur commence à freiner ?
5 On appelle \(t_{arrêt}\) le temps au bout duquel la locomotive s’arrête. Donner l’expression de \(t_{arrêt}\). Calculer \(t_{arrêt}\).
6 On appelle \(D_{arrêt}\) la distance au bout de laquelle la locomotive s’arrête. Calculer \(D_{arrêt}\).
C - Passage d’un virage
Un peu plus loin sur le trajet, un drone en vol stationnaire a permis de filmer le mouvement de la locomotive.
Dans cette partie, on assimilera la locomotive à un point \(L\).
Les positions successives du point \(L\) ont été reproduites sur la chronophotographie ci-dessous à intervalle de temps \(Δt = \pu{5 s}\).
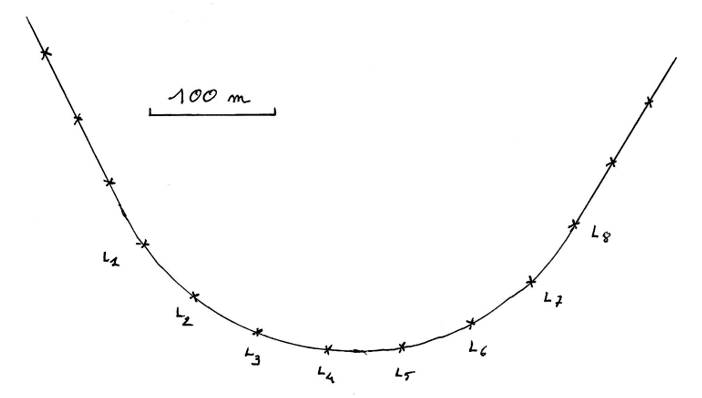
1 Quelle est la nature du mouvement sur cette portions de voie ferrée (de \(L_1\) à \(L_8\)) ?
2 Pour être aux normes, le tracé de la voie ferrée doit avoir un rayon supérieur à \(\pu{100 m}\). Cette condition est-elle vérifiée pour la portion de voie ferrée étudiée ?
3 Étude de la vitesse du train
3.a Déterminer la valeur de la vitesse du train.
3.b Tracer le vecteur vitesse pour la position \(L_6\) du point L. On utilisera l’échelle de vitesse suivante : \(\pu{2 m*s–1} \leftrightarrow \pu{1 cm}\).
4 Sans soucis d’échelle, tracer le vecteur accélération pour la position \(L_6\) du point \(L\).